Jumpery pro různé drivery
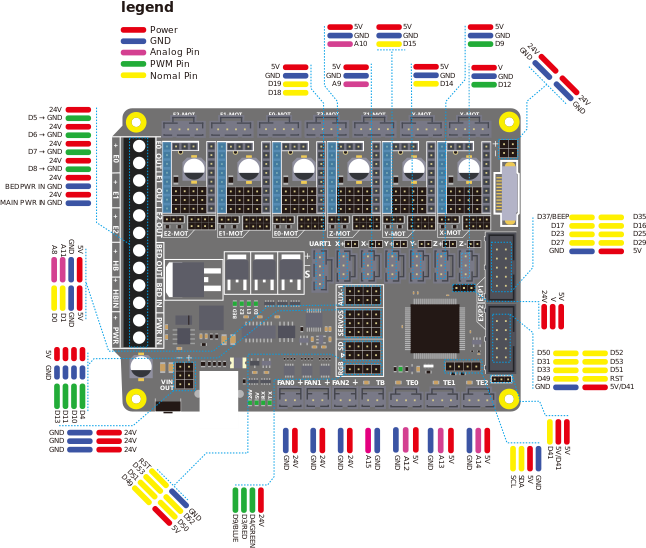
Aby bylo možné podporovat co nejvíce různých ovladačů, nabízí řídící deska F6 mnoho pozic jumperů. Různé moduly pohonů vyžadují různé propojky. Zde následuje podrobný popis:
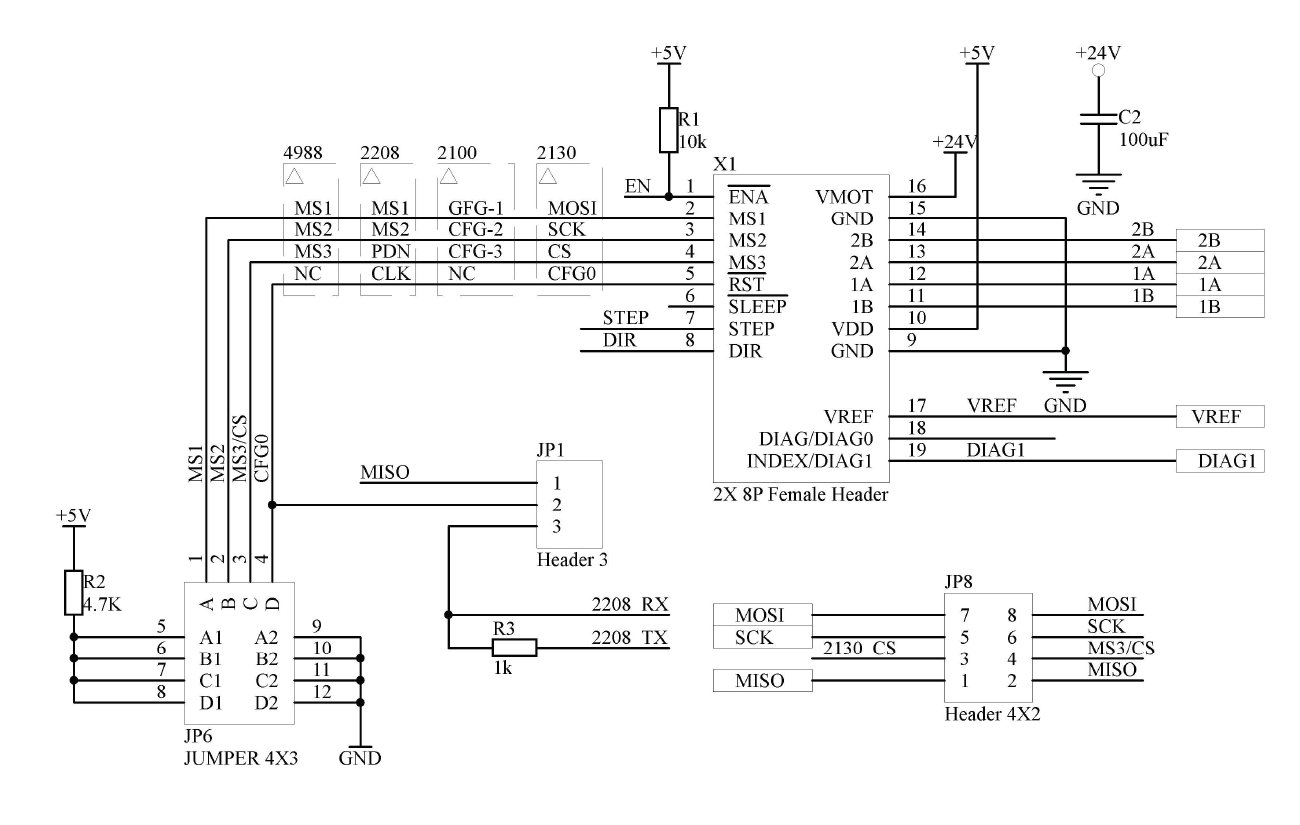
Jak je znázorněno na výše uvedeném schématu, v sekci pohonu se nacházejí tři sady jumperů: JP1, JP6 a JP8. Přiřazení driverů jsou uvedeny v následující tabulce:
| Třída driverů |
Odpovídající jumper |
| A4988/DRV8825/THB6128/LV8729 |
JP6 (jen ABC) |
| TMC2100 |
JP6 (jen ABC) |
| TMC2208 |
JP1 (zkrátit 2&3) a JP6 |
| TMC2130 |
JP1 (zkrátit 2&3) a JP8 (všechny zkrátit) |
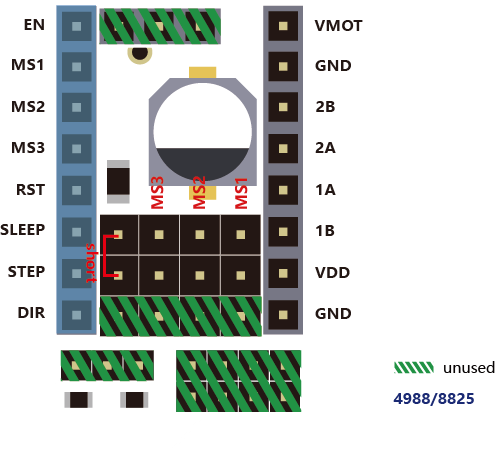
A4988 a podobné série
Pokud používáte běžný modul řady A4988, stačí nastavit jumper podle polohy uvedené na obrázku níže. Do zeleně stínované části byste neměli vkládat žádné jumpery.
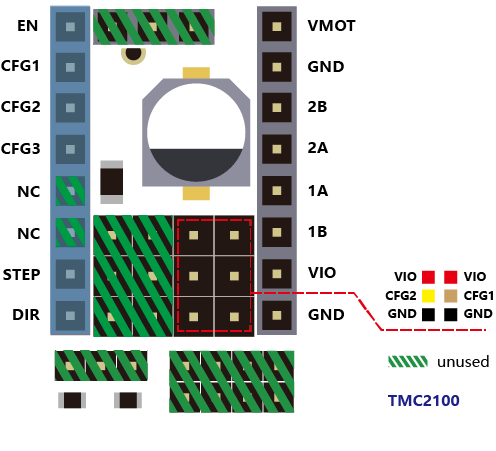
TMC2100
Pokud používáte modul TMC2100 a chcete změnit jeho nastavení mikrokroků a režimů, musíte nejprve zajistit, aby byly CFG1 a CFG2 modulu 2100 propojeny vedlejším pinem. (U verze FYSETC můžete provádět pouze konfiguraci pájením na desce.).
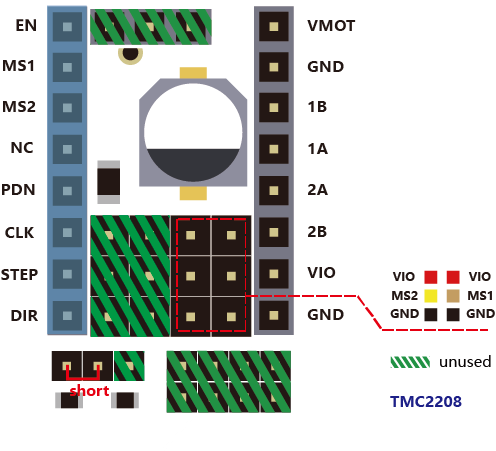
TMC2208
Pokud používáte TMC2208, můžete si vybrat ze dvou režimů. FYSETC 2208 je z výroby nastaven na Standalone režim. V tomto režimu můžete nastavovat pouze mikrokroky pomocí MS1 a MS2. Pokud chcete konfigurovat více, musíte povolit PDN. Prvně musíte udělat propojku vedle PDN uzavřeného pinu a poté se ujistěte, že 2 a 3 pin JP1 propojky vedle pozice pohonu na desce F6 je připojena. Pak můžete provést konfiguraci 2208 s marlinem (SoftwareSerial).
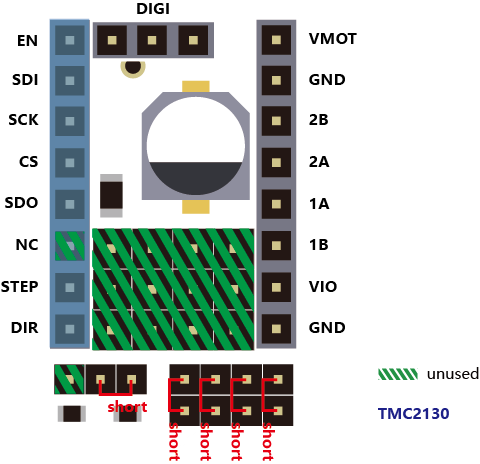
TMC2130
Pokud používáte TMC2130, měli byste použít režim SPI. FYSETC má verzi speciálně pro F6. Nastavení jumperů na základní desce je takové, jak je uvedeno níže a stínovaná zelená část se nepoužívá. Pokud chcete používat funkci bezsenzorového koncového vypínače 2130, musíte také připojit jumper vedle zásuvky koncového vypínače. Odpovídající pozice jednotlivých spínačů jsou následující: X- = X, X+ = E2, Y- = Y, Y+ = E1, Z- = Z, Z+ = E0, poté nakonfigurujte firmware a můžete používat všechny funkce 2130.
Pin definice
/**
* Mini-Rambo pin assignments
*/
#define X_MIN_PIN 63
#define X_MAX_PIN 64
#define Y_MIN_PIN 14
#define Y_MAX_PIN 15
#define Z_MIN_PIN 12
#define Z_MAX_PIN 2
//
// Z Probe (when not Z_MIN_PIN)
//
#ifndef Z_MIN_PROBE_PIN
#define Z_MIN_PROBE_PIN -1 //
#endif
//
// Steppers
//
#define X_STEP_PIN 54
#define X_DIR_PIN 55
#define X_ENABLE_PIN 38
#define Y_STEP_PIN 60
#define Y_DIR_PIN 61
#define Y_ENABLE_PIN 56
#define Z_STEP_PIN 43
#define Z_DIR_PIN 48
#define Z_ENABLE_PIN 58
#define E0_STEP_PIN 26
#define E0_DIR_PIN 28
#define E0_ENABLE_PIN 24
#define E1_STEP_PIN 36
#define E1_DIR_PIN 34
#define E1_ENABLE_PIN 30
#define E2_STEP_PIN 59
#define E2_DIR_PIN 57
#define E2_ENABLE_PIN 40
#define X_CS_PIN 70
#define Y_CS_PIN 39
#define Z_CS_PIN 77
#define E0_CS_PIN 47
#define E1_CS_PIN 32
#define E2_CS_PIN 42
#define X_TMC2130_DIAG -1
#define Y_TMC2130_DIAG -1
#define Z_TMC2130_DIAG -1
#define E0_TMC2130_DIAG -1
#define E1_TMC2130_DIAG -1
#define E2_TMC2130_DIAG -1
#if ENABLED(HAVE_TMC2208)
/**
* Software serial
*/
#define X_SERIAL_RX_PIN 71
#define X_SERIAL_TX_PIN 72
#define Y_SERIAL_RX_PIN 73
#define Y_SERIAL_TX_PIN 75
#define Z_SERIAL_RX_PIN 78
#define Z_SERIAL_TX_PIN 79
#define E0_SERIAL_RX_PIN 76
#define E0_SERIAL_TX_PIN 77
#define E1_SERIAL_RX_PIN 80
#define E1_SERIAL_TX_PIN 81
#define E2_SERIAL_RX_PIN 22
#define E2_SERIAL_TX_PIN 82
#endif
//
// Temperature Sensors
//
#define TEMP_0_PIN 12 // Analog Input
#define TEMP_1_PIN 13 // Analog Input
#define TEMP_2_PIN 14 // Analog Input
#define TEMP_BED_PIN 15 // Analog Input
//
// Heaters / Fans
//
#define HEATER_0_PIN 5
#define HEATER_1_PIN 6
#define HEATER_2_PIN 7
#define HEATER_BED_PIN 8
#define FAN0_PIN 44
#define FAN1_PIN 45
#define FAN2_PIN 46
//
// Misc. Functions
//
#define SDSS 53
#define LED_PIN 13
#if ENABLED(RGB_LED) || ENABLED(RGBW_LED)
#define RGB_LED_R_PIN 3
#define RGB_LED_G_PIN 4
#define RGB_LED_B_PIN 9
#define RGB_LED_W_PIN -1
#endif
#ifndef FILWIDTH_PIN
#define FILWIDTH_PIN 10 // Analog Input on endstop X+
#endif
// define digital pin 10 for the filament runout sensor. Use the digital input 10 on the servos connector
#define FIL_RUNOUT_PIN 10
// define digital pin 11 for the PS_ON control. Use the digital input 11 on the servos connector
#ifndef PS_ON_PIN
#define PS_ON_PIN 11
#endif
//////////////////////////
// LCDs and Controllers //
//////////////////////////
#define LCD_PINS_RS 16
#define LCD_PINS_ENABLE 17
#define LCD_PINS_D4 23
#define LCD_PINS_D5 25
#define LCD_PINS_D6 27
#define LCD_PINS_D7 29
#define BEEPER_PIN 37
#define BTN_EN1 31
#define BTN_EN2 33
#define BTN_ENC 35
#define SD_DETECT_PIN 49
#define KILL_PIN 41